在空氣質(zhì)量日益受到關(guān)注的今天,家用空氣凈化器已經(jīng)從高端家電逐漸成為許多家庭的必備品。市場(chǎng)上琳瑯滿(mǎn)目的凈化產(chǎn)品,其背后究竟隱藏著哪些不為人知的‘黑科技’?從中關(guān)村在線(xiàn)的家電凈化器測(cè)評(píng)與資訊中,我們可以一窺現(xiàn)代凈化科技的前沿與奧秘。
一、核心凈化技術(shù)的演進(jìn):從HEPA到分子級(jí)捕捉
傳統(tǒng)的高效微粒空氣(HEPA)濾網(wǎng)技術(shù)曾是凈化器的黃金標(biāo)準(zhǔn),能有效過(guò)濾0.3微米以上的顆粒物,如粉塵、花粉和部分細(xì)菌。隨著科技發(fā)展,更先進(jìn)的技術(shù)已嶄露頭角:
- 超高效復(fù)合濾網(wǎng):結(jié)合HEPA與活性炭,在物理過(guò)濾的同時(shí)吸附甲醛、異味等氣態(tài)污染物,實(shí)現(xiàn)多效合一。
- 光催化氧化技術(shù):利用紫外線(xiàn)與催化劑反應(yīng),分解空氣中的有機(jī)污染物和病毒,將其轉(zhuǎn)化為無(wú)害的水和二氧化碳。
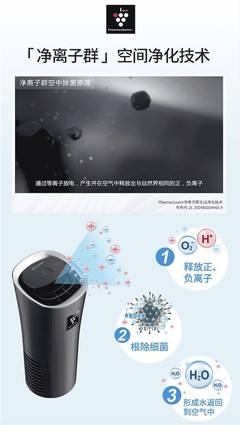
- 離子群技術(shù):釋放正負(fù)離子,主動(dòng)捕捉并沉降PM2.5等超細(xì)顆粒,甚至能抑制過(guò)敏原活性。
二、智能感知與自適應(yīng)系統(tǒng):讓凈化‘更懂你’
現(xiàn)代凈化器的‘黑科技’不僅體現(xiàn)在凈化能力上,更在于其智能化程度。通過(guò)激光粉塵傳感器、甲醛電化學(xué)傳感器等,設(shè)備可以實(shí)時(shí)監(jiān)測(cè)空氣質(zhì)量,并自動(dòng)調(diào)整運(yùn)行模式。例如,部分高端機(jī)型搭載AI算法,能學(xué)習(xí)用戶(hù)的使用習(xí)慣,預(yù)判污染變化,實(shí)現(xiàn)‘無(wú)人值守’的高效凈化。物聯(lián)網(wǎng)技術(shù)讓凈化器可與手機(jī)APP聯(lián)動(dòng),用戶(hù)隨時(shí)遠(yuǎn)程查看數(shù)據(jù)、開(kāi)關(guān)機(jī)或調(diào)整設(shè)置,讓健康管理盡在掌握。
三、靜音與能效的創(chuàng)新:平衡性能與體驗(yàn)
凈化器長(zhǎng)期運(yùn)行,噪音和耗電成為用戶(hù)體驗(yàn)的關(guān)鍵。新一代產(chǎn)品采用無(wú)刷直流電機(jī)和流體動(dòng)力學(xué)風(fēng)道設(shè)計(jì),在保證大風(fēng)量的同時(shí)將噪音降至25分貝以下,相當(dāng)于輕聲耳語(yǔ)。節(jié)能技術(shù)的突破,如低功耗待機(jī)模式與變頻控制,使能效比大幅提升,符合綠色家電的趨勢(shì)。
四、人性化設(shè)計(jì)與場(chǎng)景化應(yīng)用
針對(duì)不同家庭需求,凈化科技也走向細(xì)分:
- 母嬰機(jī)型:加強(qiáng)除菌功能,配備輕柔睡眠模式。
- 車(chē)載凈化器:迷你化設(shè)計(jì),專(zhuān)注對(duì)抗車(chē)內(nèi)甲醛與尾氣。
- 全屋集成系統(tǒng):與新風(fēng)系統(tǒng)結(jié)合,實(shí)現(xiàn)通風(fēng)與凈化的統(tǒng)一。
這些創(chuàng)新不僅提升了實(shí)用性,更讓科技真正服務(wù)于生活細(xì)節(jié)。
凈化科技的未來(lái)展望
從中關(guān)村在線(xiàn)等平臺(tái)的測(cè)評(píng)可見(jiàn),家用凈化產(chǎn)品正朝著更高效、更智能、更靜謐的方向發(fā)展。隨著納米材料、人工智能的深入應(yīng)用,凈化器或許能像‘空氣管家’一樣,主動(dòng)預(yù)警健康風(fēng)險(xiǎn),甚至定制個(gè)性化凈化方案。對(duì)于消費(fèi)者而言,了解這些‘黑科技’,有助于在選擇產(chǎn)品時(shí)透過(guò)營(yíng)銷(xiāo)看本質(zhì),找到真正適合自己家庭的那一款凈化利器。畢竟,在追求純凈空氣的道路上,科技永遠(yuǎn)是我們最可靠的盟友。